In Evidenza
Libri
Apocalittici
Artbook
Cucina
Cultura Pop
Marvel
Multipop
Videogiochi da leggere
Guide Strategiche
Gadget
Peluche Nintendo
Action Figures Nintendo
Puzzle
News
Contatti
Chi Siamo
Download
Ricerca
front_New_map
Home
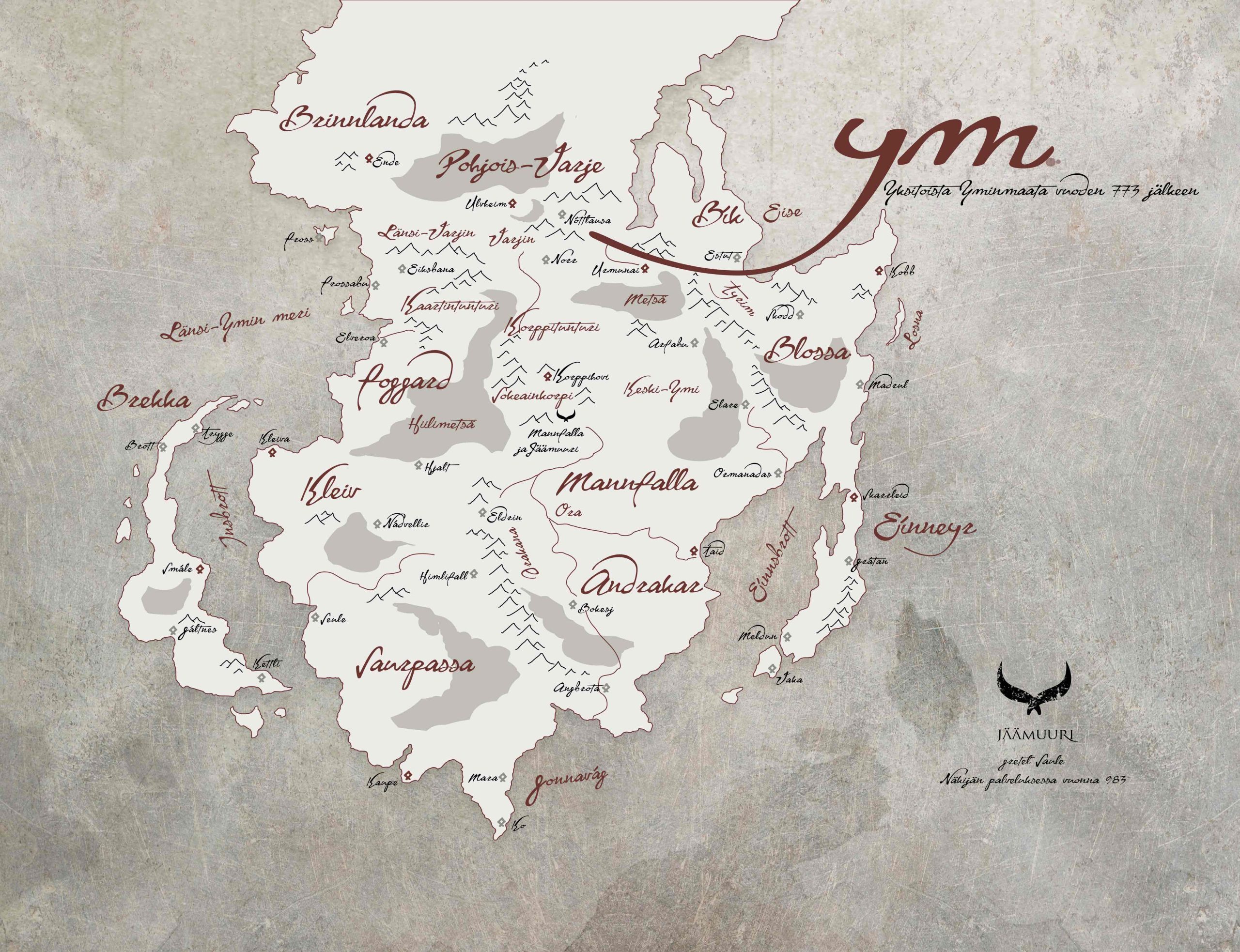
Anteprima: Il Marciume, il sequel de LA FIGLIA DI ODINO
front_New_map
front_New_map
21 Dicembre 2017
|
By
admin
Precedente
Prossimo